



Პოზიციის კონტროლი და ზუსტი ავტომატიზაცია XCKJ ლიმიტის ჩამრთველის გამოყენებით
Ინდუსტრიული ავტომატიზაციის ზუსტი პოზიციის უკუკავშირის საჭიროება
Თანამედროვე სამრეწველო სისტემები მოითხოვს პოზიციონალური სიზუსტე ± 0,1 მმ-ის ფარგლებში, რათა შეინარჩუნოს წარმოების ხარისხი და მოწყობილობების უსაფრთხოება. არასათანადო უკუკავშირის მექანიზმები განაპირობებს ავტომატიზირებული სამუშაო პროცესების არაპროგნოზირებული შეფერხების 18%-ს (Industrial Engineering Journal 2023), რაც ხაზს უსვამს ზუსტი აღქმის კრიტიკულ როლს.
Როგორ XCKJ ლიმიტი Switch უზრუნველყოფს საიმედო პოზიციის გამოვლენა
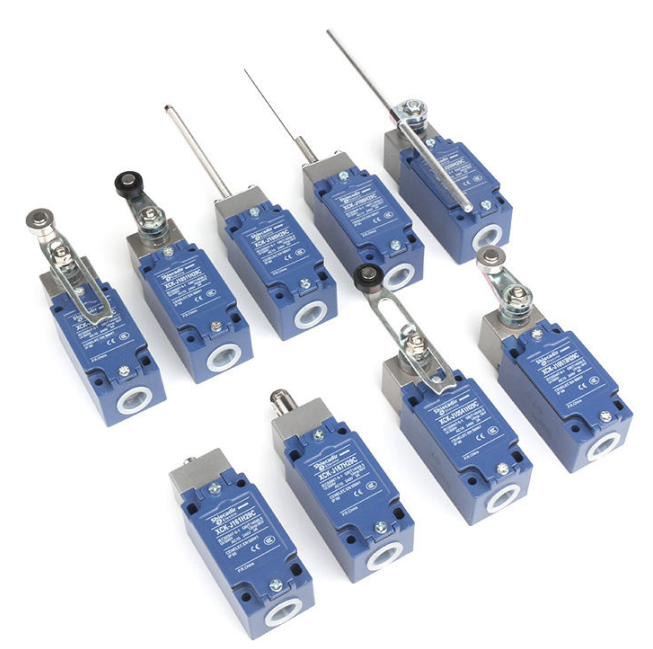
XCKJ ლიმიტის ჩამრთველი ფლობს გაზაფხულზე დატვირთულ რგოლს კონტაქტებთან ერთად, რომლებიც სრულად არის დახურული დაბინძურებისგან. ეს კონფიგურაცია უზრუნველყოფს საიმედო მუშაობას მაშინაც კი, როდესაც ექვემდებარება ვიბრაციებს, რომლებიც ძლიერია 15 გრამით ან ექსტრემალური ტემპერატურები -40 გრადუსიდან 85 გრადუსამდე. გამძლე მასალებით შექმნილი ეს გამრთელები დაახლოებით 30%-ით მეტ ხანს იმუშავებენ ვიდრე ჩვეულებრივი მოდელები. ეს მათ განსაკუთრებით შესაფერისად ხდის იმ გარემოში, სადაც ისინი მუდმივად გამოიყენება, მაგალითად იმ დატვირთულ რობოტურ შედუღების სადგურებში, რომლებიც უწყვეტად მუშაობენ წარმოების ცვლის განმავლობაში.
Შემთხვევის ანალიზი: პოზიციის ვერიფიკაცია CNC სამუშაო მანქანებში
Მწარმოებელმა ავტომობილების ლიდერმა 58 CNC ფრეზებზე XCKJ სარქვლების ინტეგრაციის შემდეგ შპინდლის პოზიციონირების შეცდომები 72%-ით შეამცირა. ამ ამონაწერმა იძლევა ინსტრუმენტების პოზიციების რეალურ-დროში ვერიფიკაციას ISO 230 სტანდარტების შესაბამისად ზუსტი წარმოების გარემოში, რიცხვით მიღწეული იყო ±5 მიკრონის განმეორებადობა 1,2 მილიონი ციკლის განმავლობაში.
XCKJ სარქვლების ოპტიმალური განთავსების საუკეთესო პრაქტიკები
- Განათავსეთ სარქვლები აქტუატორის მოძრაობის ვექტორების მიმართ პერპენდიკულარულად
- Შეინარჩუნეთ 3-5 მმ-იანი ზემეტი სივრცე მექანიკური დამუხრუჭებისთვის
- IP67 კლასიფიკაციის მოდელების გამოყენება გაგრილების სითხის მქონე სამუშაო სივრცეებში
Თანამედროვე მანქანებში სიზუსტის კონტროლის მზარდი მოთხოვნა
Ინდუსტრიული პოზიციის სენსორების გლობალური ბაზარი, სავარაუდოდ, 2027 წლისთვის $4.8 მილიარდს მიაღწევს (MarketsandMarkets 2023), რაც განპირობებულია ავტომობილების ელექტრიფიკაციით და საჰაერო-სივრცის მიკრო-სამუშა XCKJ-ის 12-მს რეაგირების დრო აკმაყოფილებს მზარდ საჭიროებებს მილიწამში ქვე-სინქრონიზაციისათვის მაღალი სიჩქარის დამზადების ხაზებში.
Კონვეიერი და მასალების დამუშავების სისტემები: საბოლოო წერტილის გამოვლენა და უსაფრთხოება
Კონვეიტერის უკონტროლო მოძრაობიდან გამომდინარე საავტომობილო საფრთხეების თავიდან აცილება
Კონვეიერის უკონტროლო მოძრაობა წარმოადგენს სამრეწველო გადამუშავების შემთხვევების 17%-ს, რომლებიც ხშირად გამოწვეულია არასწორად გაწყობილი ბოლო წერტილებით ან არამცნობი გადაადგილებით (Material Handling Safety Alliance, 2023). XCKJ საზღვრის ჩამრთველი ამცირებს ამ რისკებს, როდესაც ელექტროენერგიის შეწყვეტა ხდება, როდესაც მანქანა აღემატება წინასწარ განსაზღვრულ პოზიციებს, რაც უზრუნველყოფს ISO 13849-1 უსაფრთხოების ნორმების შესაბამისობას.
XCKJ მგზავრობის ლიმიტის ჩამრთველის როლი კონვეიტერების ავტომატიზაციაში
Ეს ჩამრთველები იყენებენ ორმხრივ წრეების გადაჭარბებას მაღალი ვიბრაციის გარემოში ბოლო წერტილების დასადგენად, რაც 99.8%-იან ოპერაციულ საიმედოობას აღწევს უხვად მასალების სისტემებში. 2024 წლის სამრეწველო ავტომატიზაციის კვლევის შედეგად დადგინდა, რომ XCKJ-ის ჩართვის საშუალებით დამონტაჟებული ობიექტები კონვეიტერებთან დაკავშირებულ შეფერხებებს 54%-ით ამცირებენ, ვიდრე ძირითადი სენსორული სისტემები.
Შემთხვევის შესწავლა: გადაადგილების თავიდან აცილება უხვად მასალის გადატანაში
Ჩრდილოეთ ამერიკის ცემენტის ქარხანამ წლიურად 290 ათასი დოლარი დახარჯა საბურავის შეცვლის ხარჯებზე გადასატან წერტილებზე XCKJ ჩართვის შედეგად. ჟრანთრვ დთ დთ სეექრთლთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრანთ ჟრ
Ორმაგი XCKJ სარქვლის გამოყენება საიმედოობის გასაზრდელად
Კრიტიკულ გამოყენებებში, როგორიცაა დახრილი კონვეიერები, ახლა გამოიყენება პარალელურად მოწყობილი XCKJ სარქვლები, სადაც მეორე მოწყობილობა ჩართვის შემთხვევაში მოხდება, თუ პირველადი დეტექტირება ჩაიშლება. ეს კონფიგურაცია აკმაყოფილებს SIL-2 უსაფრთხოების მოთხოვნებს და შესაძლებელი ხდება <0,5 წამში რეაგირება.
Გაჭურვებული ინტეგრაციის ტენდენციები კონვეიერული სისტემების მონიტორინგში
Თანამედროვე ინსტალაციები XCKJ სარქვლებს აერთებენ IoT შუამავლებთან, რაც საშუალებას აძლევს პროგნოზირებადი შემოწმების ჩატარებას სიმღერის პოზიციის რეალურ დროში ანალიზის საშუალებით. ეს ინტეგრაცია 38%-ით უფრო სწრაფად ამოიცნობს სიმეტრიის დარღვევებს ხელით შემოწმების შედარებით.
Უსაფრთხოების საკეტები და ავარიული მართვა სამრეწველო მანქანებში
Მანქანების ავარიების შემცირება მოძრაობის ჩაკეტვებით
Მწარმოებლები ყოველჯერზე, როდესაც სამრეწველო მანქანების ავარია ხდება, დაახლოებით 740 000 დოლარს კარგავს. პონემონის ინსტიტუტის კვლევის მიხედვით, გასული წლის მონაცემებით, ეს განმარტავს, რატომაც ამდენი კომპანია ახლა უკეთეს უსაფრთხოების ხსნარებს ეძებს. ეს მოძრაობის ჩაკეტვები ძირითადად აჩერებს მანქანების დაწყებას თუ რამე არასწორად მოხდა უსაფრთხოების პარამეტრებთან. დაფიქრდით რა მოხდება, როდესაც ტექნიკური მომსახურების მუშაკები გახსნიან პანელებს ან ნაწილებს, რომლებიც ოპერაციის დროს არ არიან გამართულნი. ჲეჟრჲმ ჟვ ჲბჟვნვ ეა ჲბპვეჲდნვ ოპვკჲზნჲ ოპვკრთგვრჲ. მაგალითად ავტომატური პრესები. როდესაც მათ აქვთ შესაბამისი ჩაკეტვის სისტემები, მუშები გაცილებით ნაკლებად იღებენ დაზიანებებს, ვიდრე ისინი, ვინც ძველებურად მართავენ ხელით. ზოგიერთი კვლევა აჩვენებს, რომ დაზიანების მაჩვენებელი 82%-ით მცირდება, როდესაც უსაფრთხოების ამ თანამედროვე საშუალებებია გამოყენებული.
Უსაფრთხოების მექანიზმები XCKJ ლიმიტის ჩამრთველი საშიში გამოყენების
XCKJ ლიმიტის ჩამრთველებს აქვთ ჩაშენებული გამაფრთხილებელი მახასიათებლები, რომლებიც ძალიან ამცირებს საფრთხეებს იმ ადგილებში, სადაც ყველაფერი შეიძლება სწრაფად არასწორად წარიმართოს, როგორიცაა ქიმიური დამუშავების ზონები ან მეტალის დამუშავების მაღაზიები. ამ ჩართვებზე არის IP67 სტანდარტების დაცვა რაც ნიშნავს რომ ისინი უძლებენ ძალიან მძიმე პირობებს, რომლებიც მერყეობენ მინუს 40 გრადუსიდან 85 გრადუსამდე. აგრეთვე, ისინი არ იჟდება, როდესაც ზემოქმედებს ზეთზე ან სიბინძურეზე, რაც გავრცელებულია სამრეწველო გარემოში. რა ამაღლებს ამ ჩამრთველების ყურადღებას არის მათი ორმაგი კონტაქტის კონფიგურაცია. თუ ერთი ნაწილი გატეხილია, მეორე მუშაობს, რათა წრეები ოპერაციის დროს ინტაქტურად დარჩეს. ქარხნები, რომლებიც გადავიდნენ XCKJ ჩაკეტვის სისტემებზე, დაახლოებით მეოთხედით ნაკლები უბედური შემთხვევა დაფიქსირდა ადგილზე. ეს გაუმჯობესება გამოწვეულია იმით, რომ ეს გამშვები ღილაკები ნაგებია ხანგრძლივი გამოყენებისთვის. ისინი გადარჩებიან დაახლოებით ათ მილიონ ციკლს, ხოლო ელექტრო დატვირთვას უპრობლემოდ ატარებენ.
Შემთხვევის შესწავლა: რობოტური ასამბლეის ხაზების საგანგებო შეჩერების აქტივაცია
Წამყვანმა ავტომწარმოებელმა დანერგა XCKJ ლიმიტის ჩამრთველები რობოტური შედუღების მკლავებზე, რათა შეესაბამებოდეს ავარიულ მოძრაობას ტექნიკური მომსახურების დროს. ძირითადი შედეგები:
- 100ms საგანგებო შეჩერების რეაგირება როდესაც ტექნიკოსები შედიან აკრძალულ ზონებში
- Ნულოვანი შეფერხების შემთხვევები 18 თვის განმავლობაში
- ISO 13849 უსაფრთხოების ნორმების დაცვა
XCKJ ჩართვის გამოყენებით უშედეგო უსაფრთხო წრეების შექმნა
XCKJ ჩართვა საშუალებას იძლევა გამარტივებული SIL-2-ის შესაბამისი სქემის დიზაინი ჩვეულებრივ დახურული კონტაქტების საშუალებით, რომლებიც გამორთავს ელექტროენერგიას ჩართვისას. უსაფრთხოების PLC-ებთან ერთად, ისინი ქმნიან ფენოვან დაცვას როგორც მექანიკური, ასევე მართვის სისტემის გაუმართაობისგან.
Უსაფრთხოების სწრაფი რეაგირების და სისტემის ეფექტურობის ბალანსი
Თანამედროვე XCKJ მოდელები აღწევს <5ms მოქმედების დროს, წარმოების სიჩქარის შეზღუდვის გარეშე. ეს კრიტიკული წინსვლაა 600 ერთეული/წუთის სიჩქარით მომუშავე ბოთლებში. ოპტიმიზირებული XCKJ ინტეგრაცია ამცირებს ცრუ გაშვებას 63%-ით, რაც უზრუნველყოფს უსაფრთხოების პროტოკოლების გაუმჯობესებას, ვიდრე შეფერხებას.
Ძრავისა და მოქმედების მართვა XCKJ ლიმიტის ჩამრთველის ინტეგრაციის მეშვეობით
Სამრეწველო ძრავები და მოქმედი მოწყობილობები საჭიროებენ ზუსტ მოძრაობის შეზღუდვას, რათა თავიდან იქნას აცილებული ხარჯვითი ტექნიკის დაზიანება. თეატრალური Xckj limit switch უზრუნველყოფს ამ კრიტიკულ კონტროლს ძლიერი მიმართულების გამჭრიახ მექანიზმების საშუალებით, რომლებიც ავტომატურად აჩერებენ მანქანას წინასწარი განსაზღვრული მოძრაობის ზღვარების მიღწევისას.
Მოწყობილობების გადატანა რეგულაციების გარეშე
Ნვაკონტროლებნარა ოპვჟრრაუთჲნჟკა ნა მვნვნვნვნარა ნაჟრაპარა ნაჟრაპარა. კვლევები აჩვენებს, რომ ავტომატიზირებულ სისტემებში მოძრაობის არასწორი რეგულირება მიუთითებს მექანიკური შეფერხებების 23% -ზე. XCKJ ჩართვა გამორიცხავს ამ რისკს, როდესაც ძრავები უვნებელ სიგრძეზე მიდიან, მოწყობილობის მიწოდება წყდება.
Გამოყენება XCKJ ჩართვა მიმართულების გადაჭრისთვის ძრავის მართვის
Ეს მაღალი მგრძნობელობის მიკრო ლიმიტის ჩამრთველები საშუალებას იძლევა ორმხრივ ძრავის მართვას:
- Წინ/უკან წრე აქტივაცია საფუძველზე actuator პოზიცია
- Მყისიერი შეზღუდვის პასუხი 5 მმ-ში ზღვარის გამოვლენის შემდეგ
- 500000+ ციკლის გამძლეობა მუდმივი ვიბრაციის დროს
Შემთხვევის შესწავლა: ჩართვის ჩიხის ანაბარი პნევმატურ მოქმედებლებში
Დამშვების ქარხანაში 120 პნევმატიკურ ცილინდრზე XCKJ სარქვლების გამოყენების შემდეგ აქტუატორის სანათურების შეცვლა შემცირდა 72%-ით. სარქვლების IP67-ის შესაბამისი კონსტრუქცია გაუძლო ზეთის სითხის გამოხატულობას და შეინარჩუნა 0,2 მმ-იანი პოზიციური განმეორებადობა სამი შეცვლის მასშტაბით.
Ენერგოეფექტურობის გაუმჯობესება ზუსტი მოძრაობის რეგულირებით
Არასაჭირო ძრავის ზედმეტი მოძრაობის აღმოფხვრით, XCKJ-ის ინტეგრაცია ენერგიის დანახარჯს 18–22%-ით ამცირებს ტიპიურ მასალის მართვის სისტემებში. სამუშაო მონაცემები აჩვენებს, რომ საწარმოები წელიწადში 740 ათას დოლარს ზოგავენ ამ მდგრადი პოზიციის სენსორების მიერ შესაძლებელი მოძრაობის პროფილების ოპტიმიზაციით.
Სიმაღლის ტექნოლოგიები რობოტებში და ავტომატიზირებულ ასამბლირების ხაზებში
Სიჩქარის მაღალი ასამბლირების ხაზების სიმეტრიის დარღვევის ამოხსნა პოზიციის გასაზომი სისტემებით
Რობოტული ხელები, რომლებიც მოძრაობენ 3 და 5 მეტრის სიჩქარით წამში, საჭიროებენ საოცრად სწრაფ პოზიციურ უკუკავშირს, მილიწამიან დონეზე, რათა თავიდან იქნას აცილებული ნაწილების მოლაგება, როდესაც ასეთ სიჩქარით აიღებენ და დებენ კომპონენტ XCKJ ლიმიტის ჩამრთველი ამ პრობლემას ზუსტად უმკლავდება. რეაგირების დრო ერთ მილიწამზე ნაკლებია და განმეორებადობა 0.05 მმ-ზე ნაკლებია. ეს საშუალებას აძლევს რობოტებს ოპერაციის დროს თითქმის მომენტალურად კორექტირონ თავიანთი ბოლო ეფექტორის პოზიციები. უახლესი კვლევების მიხედვით, ინდუსტრიული რობოტების მიმართულებით, არსებობს მკაფიო მტკიცებულება, რომ უკეთესი პოზიციის აღქმის გამოყენებით შეკრების შეცდომები დაახლოებით 92%-ით მცირდება, ვიდრე ძველ ღია წრედულ სისტემებთან შედარებით.
Წარმოების ციკლების სინქრონიზაცია XCKJ პოზიციის მონიტორინგის გამოყენებით
Მუდმივი მოქმედების პოზიციის მონაცემების უზრუნველყოფით, XCKJ ჩამრთველები საშუალებას აძლევენ ზუსტი სინქრონიზაცია მრავალ-რობოტური ასამბლეის სადგურების. ეს შესაძლებლობა კრიტიკულად მნიშვნელოვანია ავტომობილების ელექტრონიკის წარმოებაში, სადაც დროის განსხვავება 50 მილიწამში შეიძლება გამოიწვიოს წარმოების პროდუქციის 12% დანაკარგი.
Შემთხვევის შესწავლა: რეალურ დროში ერთობლივი პოზიციის შემოწმება SCARA რობოტებში
2023 წლის განხორციელების კვლევამ აჩვენა, რომ XCKJ ჩამრთველები ინარჩუნებენ ±0.03 მმ-ის პოზიციურ სიზუსტეს 1,2 მილიონი ციკლის განმავლობაში შერჩევითი შესაბამისობის ასამბლეის რობოტური მკლავის (SCARA) სისტემებში. ეს სიზუსტე საშუალებას იძლევა უწყვეტი 24/7 მუშაობა ხელით ხელახალი კალიბრაციის გარეშე, შემცირდა არაპროგნოზირებული downtime 78%.
XCKJ-ის მოდულური განთავსება მრავალსადგურულ საწარმოო ხაზებზე
Წამყვანი მწარმოებლები ახლა იყენებენ XCKJ ჩამრთველებს მოდულურ კონფიგურაციებში 15+ შეკრების სადგურზე, რომელსაც მხარს უჭერს მდგრადი საწარმოო ხაზის კვლევა, რომელიც 40% -ით უფრო სწრაფ გადასვლის დროს აჩვენებს ფიქსირებული განლაგების სისტემ ეს მიდგომა საშუალებას იძლევა სწრაფად რეკონფიგურაცია მცირე პარტიის წარმოებისთვის, ხოლო შენარჩუნება <0.1 მმ პოზიციური თანმიმდევრულობა ყველა მოდულზე.
Ხშირად დასმული კითხვები
Კაკგჲ ოპაგგა XCKJ-ს ჟრპანთრვ ნა ჟრპანთრვ?
XCKJ ლიმიტის ჩამრთველები დამზადებულია მყარი მასალებით, რომლებიც შექმნილია 15 გრამიანი ვიბრაციებისა და ტემპერატურის წინააღმდეგ -40-დან 85 გრადუსამდე, რაც მათი სიცოცხლის ხანგრძლივობას 30% -ით ახანგრძლივებს ჩვეულებრივ მოდელებთან შედარებით
Როგორ აუმჯობესებს XCKJ ჩართვა სამრეწველო უსაფრთხოებას?
Ისინი უზრუნველყოფენ დასტურ წერტილზე დამაჯერებელ გამოვლენას და საგანგებო გაჩერების აქტივაციას, რაც ხელს უშლის უკონტროლო მოძრაობებს და მანქანების ავარიებს, რაც უზრუნველყოფს ISO უსაფრთხოების სტანდარტების შესაბამისობას.
Შეიძლება თუ არა XCKJ ჩართვა გამოყენებულ იქნას საშიშ ადგილებში?
Დიახ, ისინი ფლობენ IP67 რეიტინგულ კორპუსს, რომელიც იცავს მძიმე პირობებისა და დაბინძურებისგან, იდეალურია ქიმიური დამუშავებისა და მეტალის დამუშავების სამუშაო ადგილებისთვის.
Შინაარსის ცხრილი
-
Პოზიციის კონტროლი და ზუსტი ავტომატიზაცია XCKJ ლიმიტის ჩამრთველის გამოყენებით
- Ინდუსტრიული ავტომატიზაციის ზუსტი პოზიციის უკუკავშირის საჭიროება
- Როგორ XCKJ ლიმიტი Switch უზრუნველყოფს საიმედო პოზიციის გამოვლენა
- Შემთხვევის ანალიზი: პოზიციის ვერიფიკაცია CNC სამუშაო მანქანებში
- XCKJ სარქვლების ოპტიმალური განთავსების საუკეთესო პრაქტიკები
- Თანამედროვე მანქანებში სიზუსტის კონტროლის მზარდი მოთხოვნა
-
Კონვეიერი და მასალების დამუშავების სისტემები: საბოლოო წერტილის გამოვლენა და უსაფრთხოება
- Კონვეიტერის უკონტროლო მოძრაობიდან გამომდინარე საავტომობილო საფრთხეების თავიდან აცილება
- XCKJ მგზავრობის ლიმიტის ჩამრთველის როლი კონვეიტერების ავტომატიზაციაში
- Შემთხვევის შესწავლა: გადაადგილების თავიდან აცილება უხვად მასალის გადატანაში
- Ორმაგი XCKJ სარქვლის გამოყენება საიმედოობის გასაზრდელად
- Გაჭურვებული ინტეგრაციის ტენდენციები კონვეიერული სისტემების მონიტორინგში
-
Უსაფრთხოების საკეტები და ავარიული მართვა სამრეწველო მანქანებში
- Მანქანების ავარიების შემცირება მოძრაობის ჩაკეტვებით
- Უსაფრთხოების მექანიზმები XCKJ ლიმიტის ჩამრთველი საშიში გამოყენების
- Შემთხვევის შესწავლა: რობოტური ასამბლეის ხაზების საგანგებო შეჩერების აქტივაცია
- XCKJ ჩართვის გამოყენებით უშედეგო უსაფრთხო წრეების შექმნა
- Უსაფრთხოების სწრაფი რეაგირების და სისტემის ეფექტურობის ბალანსი
- Ძრავისა და მოქმედების მართვა XCKJ ლიმიტის ჩამრთველის ინტეგრაციის მეშვეობით
-
Სიმაღლის ტექნოლოგიები რობოტებში და ავტომატიზირებულ ასამბლირების ხაზებში
- Სიჩქარის მაღალი ასამბლირების ხაზების სიმეტრიის დარღვევის ამოხსნა პოზიციის გასაზომი სისტემებით
- Წარმოების ციკლების სინქრონიზაცია XCKJ პოზიციის მონიტორინგის გამოყენებით
- Შემთხვევის შესწავლა: რეალურ დროში ერთობლივი პოზიციის შემოწმება SCARA რობოტებში
- XCKJ-ის მოდულური განთავსება მრავალსადგურულ საწარმოო ხაზებზე
- Ხშირად დასმული კითხვები


